Automatisiertes Fahren sicherer machen: Projekt RELiABEL gestartet
Automatisiertes Fahren sicherer machen: Projekt RELiABEL gestartet
Diese Arbeit bietet eine Sandbox-Umgebung, die ein schnelles Prototyping von Methoden für Active Learning im Bereich der Objekterkennung ermöglicht und bis zu einem Faktor von 32 an Rechenzeit einspart. Ergänzt wird dies durch nützliche Evaluierungsmetriken, Vergleichsgrundlagen sowie Grundlagenergebnisse auf PascalVOC und BDD100k, die von der Gemeinschaft wiederverwendet werden können.
Preprint: https://arxiv.org/pdf/2212.10836
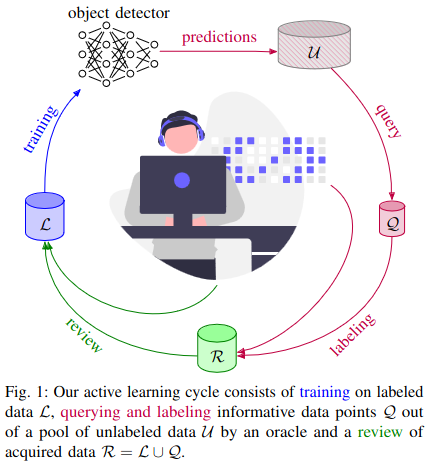
Während unserer Arbeit an [1] wurde uns klar, dass die Qualität der Beschriftungen eine besonders wichtige Rolle spielt, insbesondere wenn nur geringe Mengen an Trainingsdaten verfügbar sind. Wir kombinieren eine KI-gesteuerte Überprüfung von Beschriftungen mit einer einfachen, unsicherheitsgesteuerten Datenauswahl und zeigen, dass
1) die Überprüfung der Beschriftungen die Modellleistung (als Funktion des Beschriftungsaufwands) deutlich verbessert und dass
2) die unsicherheitsgesteuerte Datenauswahl und Beschriftungsüberprüfung tatsächlich einen Synergieeffekt aufweisen.
Preprint: https://arxiv.org/pdf/2310.00372
Beide Arbeiten wurden in Kooperation der Technischen Universität Berlin und der Universität Wuppertal durchgeführt.
Weitere Infos über #UniWuppertal: